A Hands-On Introduction to Discrete Differential Operators on Polygon Meshes
Applications II: Geodesics in Heat

Sven D. Wagner
TU Dortmund

Astrid Bunge
AutoForm Engineering

Mario Botsch
TU Dortmund

Gradient and Divergence
\[\laplace f = \div(\nabla f) \Leftrightarrow \mat L = \mat D \cdot \mat G\]
- Gradient and divergence are also important in geometry processing
- Many different applications need them
- Gradient-based deformation
- Gradient-based deformation
- Geodesic Distances
- …
Gradient and Divergence on Triangle Meshes
\(f(\mathbf x) = \sum_{i\in\mathcal V} f_i \varphi_i(\vec x)\) \(\quad\Leftrightarrow\quad\nabla f(\mathbf x) = \sum_{i\in\mathcal V} f_i \nabla \varphi_i(\mathbf x)\)
- \(\nabla \varphi_i(\mathbf x)\) is piece-wise constant (i.e., constant per triangle)
Gradient Operator \(\mathbf G \in \R^{3|\mathcal T| \times |\mathcal V|}\)
- Mapping from vertex-based scalar field to triangle-based gradient field
- Built from local per-triangle matrices \(\mat G_i \in \R^{3\times 3}\) with
\[\mat G_i(:,1) = \nabla \varphi_j(\vec x)\Big\vert_{t_{jkl}} = \frac{(\mathbf x_l - \mathbf x_k)^\bot}{2|t_{jkl}|}\]



Divergence Operator \(\mathbf D = \mat G^\top \hat{\mat M} \in \R^{|\mathcal V| \times 3|\mathcal T|}\)
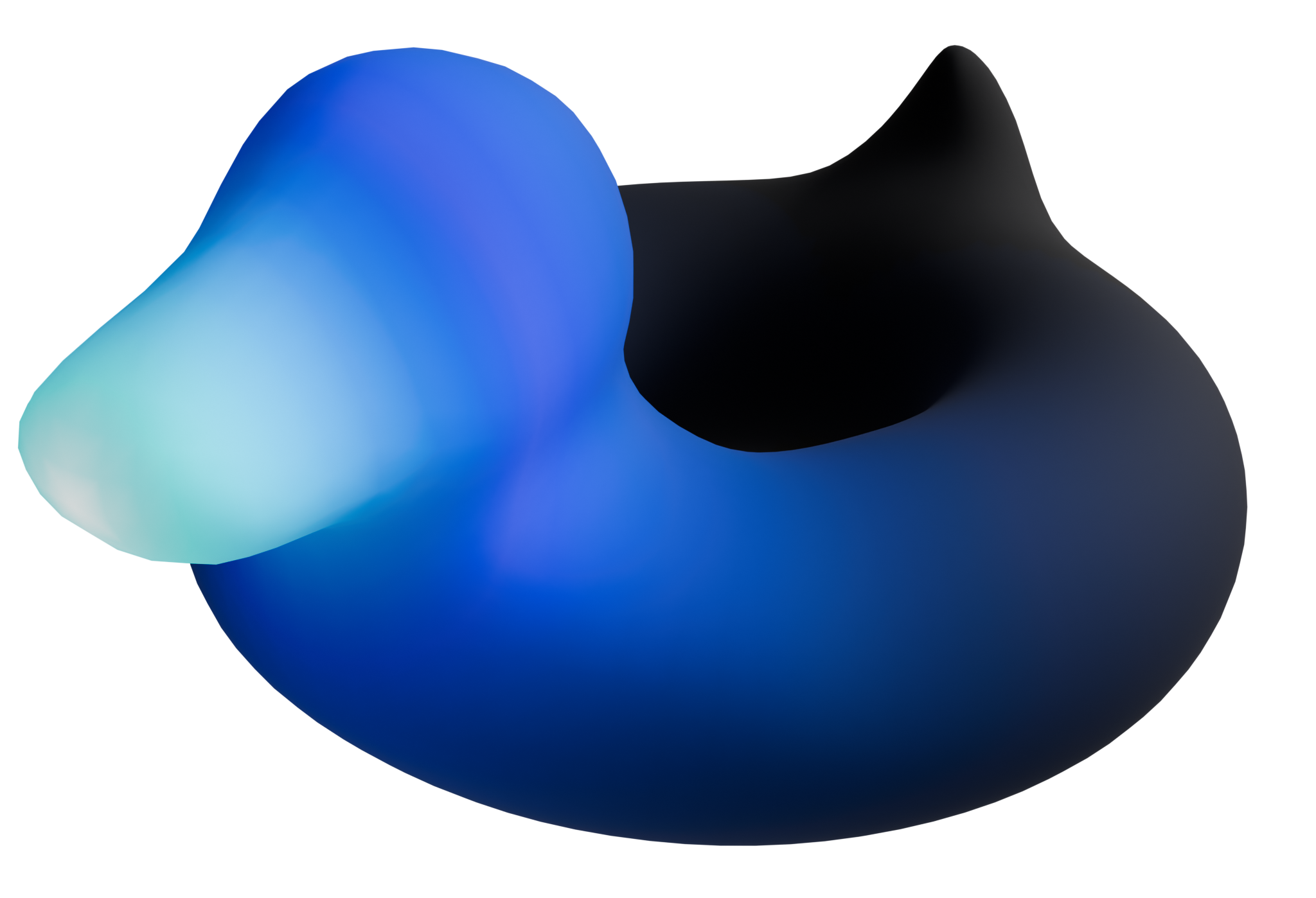
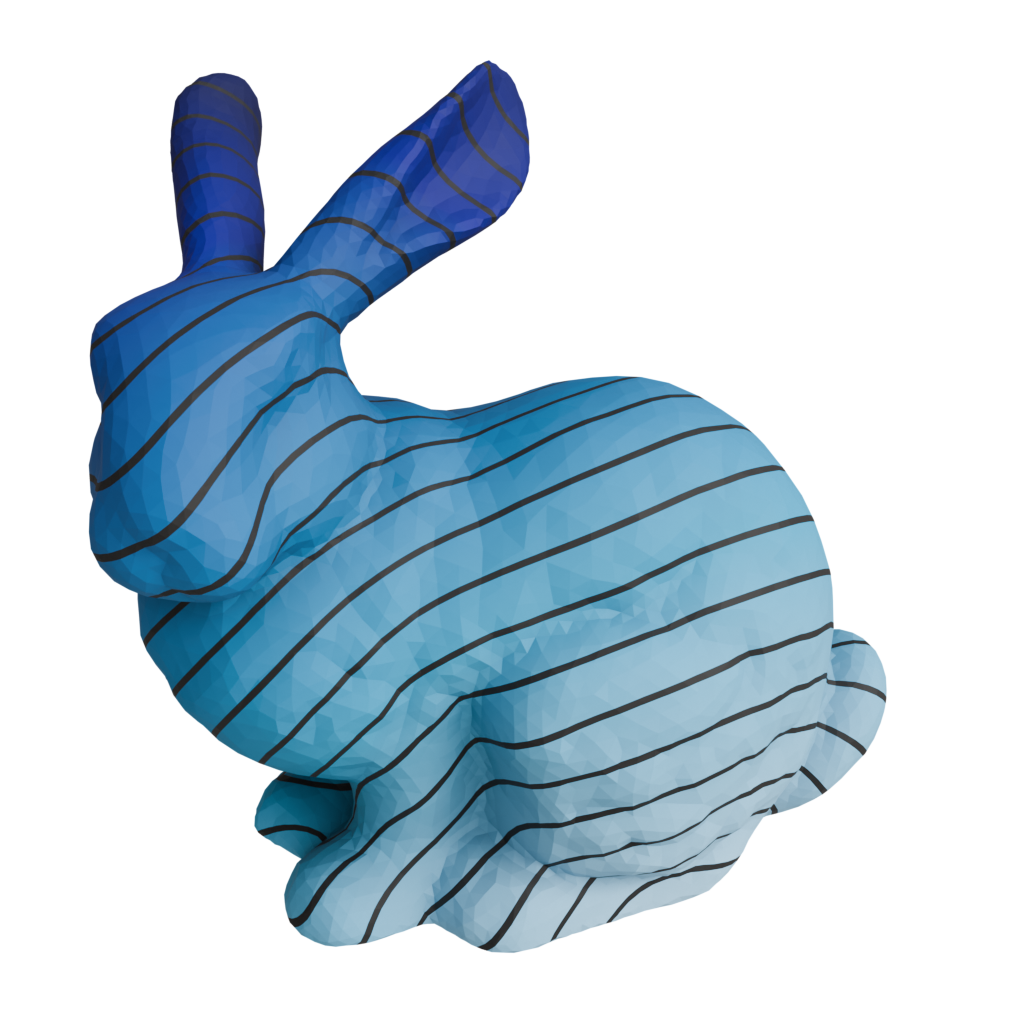
Geodesics in Heat
- We want to know the distance from a given vertex \(v_i\) to all other vertices
- Approximate geodesic distances using heat diffusion
- Idea: Both have similar normalized gradient fields
- Calculate heat flow for given time step \(t\)
- Solve implicit time integration problem \((\mat M - t \mat L) \vec u = \delta_i\)
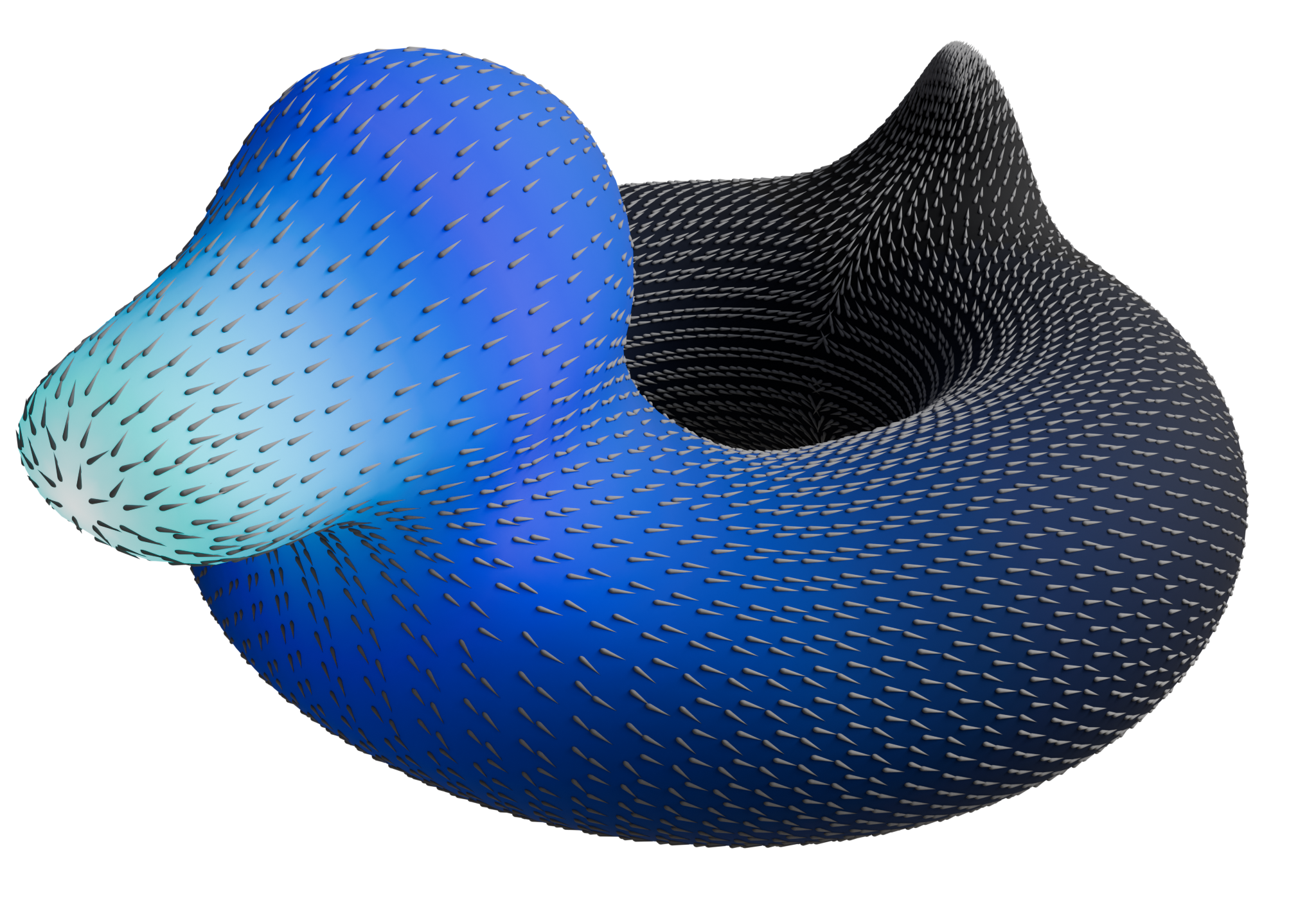
- Evaluate normalized gradient field
- Compute vector field \(\vec g_j = -(\mat G \vec u)_j / ||(\mat G \vec u)_j||\)
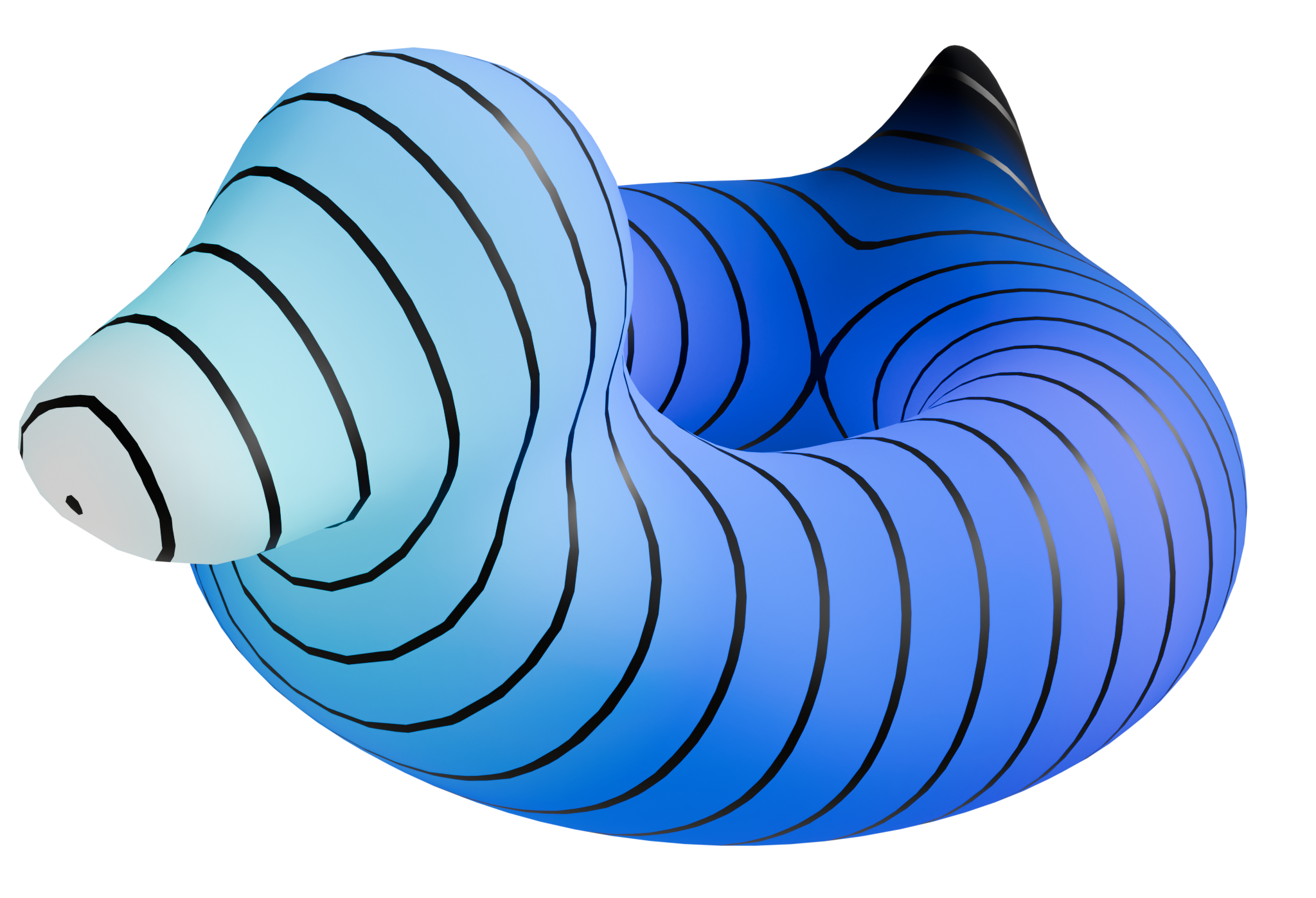
- Solve for scalar potential with closest gradient field
- Solve Poisson equation \(\mat L \, \vec d = \mat D \, \vec g\)
\(\vec d\) contains geodesic distances from \(v_i\) 👍